Je me suis inspiré de cet exemple JavaScript : http://codepen.io/velenoise/pen/wabZva .
L'astuce réside dans le CSS de la page index.html : les canvas ont une position absolue, et on gère leur profondeur grâce au z-index.


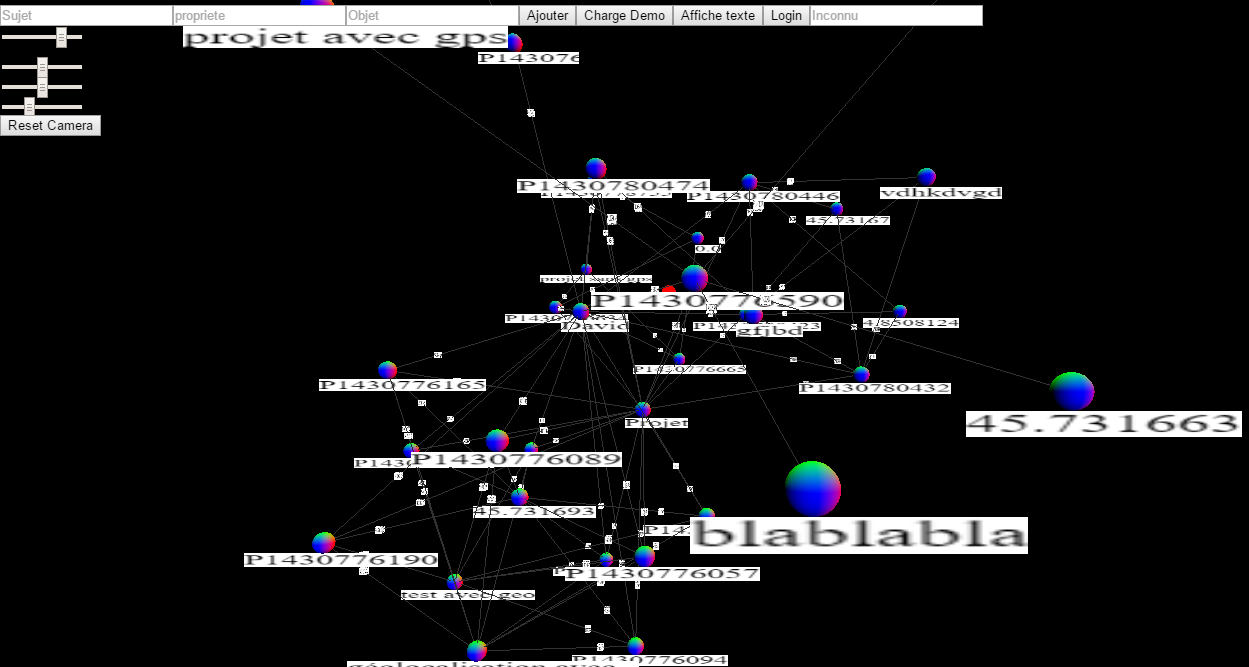
le cube vert est géré par three.js, alors que le reste : inputbox, bouttons sphère colorée, cube coloré, ellipse jaune et texte sont gérés par P5JS( en 2D ou en 3D, modifiable par la ligne : var p5js3Dou2D = "3D"; // choix : "3D" ou "2D" : si "3D" --> p5js en 3D, sinon en 2D )
code sketch.js (p5.js)
var scene, camera, renderer, geometry, material, cube;
var saisieDiv, inpSujet, inpProp, inpObjet;
var p5js3Dou2D = "2D"; // choix : "3D" ou "2D" : si "3D" --> p5js en 3D, sinon en 2D
function setup() {
if (p5js3Dou2D == "3D") {
canvas = createCanvas(window.innerWidth, window.innerWidth, WEBGL);
} else {
canvas = createCanvas(window.innerWidth, window.innerWidth, 'p2d');
noSmooth();
}
canvas.attribute("id", "defaultCanvas0");
noStroke();
saisieDiv = createDiv('');
saisieDiv.attribute("id", "saisieDiv");
saisieDiv.position(10, 10);
inpSujet = createInput('');
inpSujet.attribute('id', 'inpSujet');
inpSujet.attribute('placeholder', 'Sujet');
saisieDiv.child(inpSujet);
inpProp = createInput('');
inpProp.attribute('placeholder', 'propriete');
saisieDiv.child(inpProp);
inpObjet = createInput('');
inpObjet.attribute('placeholder', 'Objet');
saisieDiv.child(inpObjet);
buttonAjoute = createButton("Ajouter");
saisieDiv.child(buttonAjoute);
}
function draw() {
if (p5js3Dou2D == "3D") {
// coordonnees origine : centre du canvas
push();
translate(-100, -100, -10);
sphere(20);
pop();
push();
translate(-300, -200, -20);
rotateX(frameCount * 0.01);
rotateY(frameCount * 0.01);
box(20, 20, 20);
pop();
} else {
// coordonnees absolues depuis coin au gauche
fill(255, 255, 10);
ellipse(100, 100, 100, 100);
fill(255);
textSize(15);
textFont("serif");
text("Ici on est en mode 2D, modifiez la variable 'p5js3Dou2D' dans le code pour passer en 3D", 100, 500);
}
}
function render() {
cube.rotation.x -= 0.01;
cube.rotation.y += 0.01;
requestAnimationFrame(render);
renderer.render(scene, camera);
}
window.addEventListener('load', function() {
container = document.getElementById('body');
scene = new THREE.Scene();
camera = new THREE.PerspectiveCamera(75, window.innerWidth / window.innerHeight, 0.1, 1000);
camera.position.z = 5;
geometry = new THREE.BoxGeometry(1, 1, 1);
material = new THREE.MeshBasicMaterial({
color: 0x00ff00
});
cube = new THREE.Mesh(geometry, material);
scene.add(camera);
scene.add(cube);
renderer = new THREE.WebGLRenderer();
renderer.setSize(window.innerWidth, window.innerHeight);
container.appendChild(renderer.domElement);
render();
});
--------------------------------------------------------------code index.html
--------------------------------------------------------------<!DOCTYPE html> <html> <head> <meta charset="UTF-8"> <title>dreamcatchThreeDi</title> <script src="js/three.min.js"></script> <script src="libraries/p5.js" type="text/javascript"></script> <script src="libraries/p5.dom.js" type="text/javascript"></script> <script src="libraries/p5.sound.js" type="text/javascript"></script> <script src="sketch.js" type="text/javascript"></script> <style> body { padding: 0; margin: 0; } canvas { vertical-align: top; position: absolute; } #container { z-index: 2; } #container canvas { z-index: 2; } #defaultCanvas0 { z-index: 10; } #saisieDiv { z-index:15; } </style> </head> <body id='body'> <div id="container"></div> </body> </html>