(Update 07/01/2016)
un nouveau script d'installation qui reprend la procédure décrite dans cette page est dispo
ici .
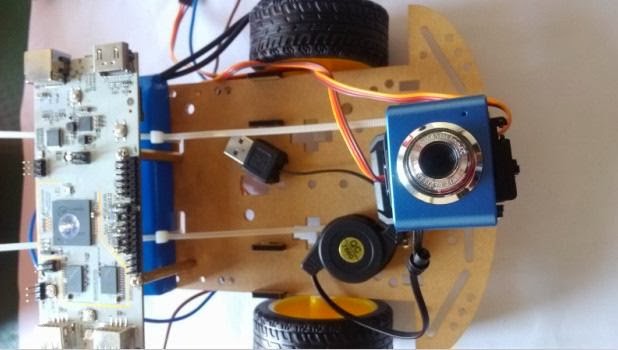
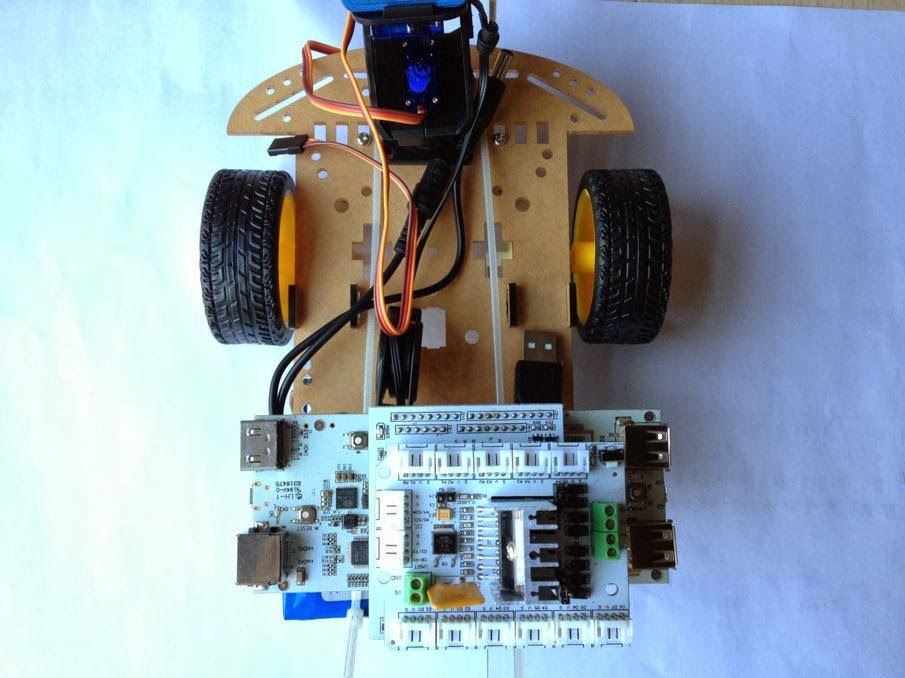
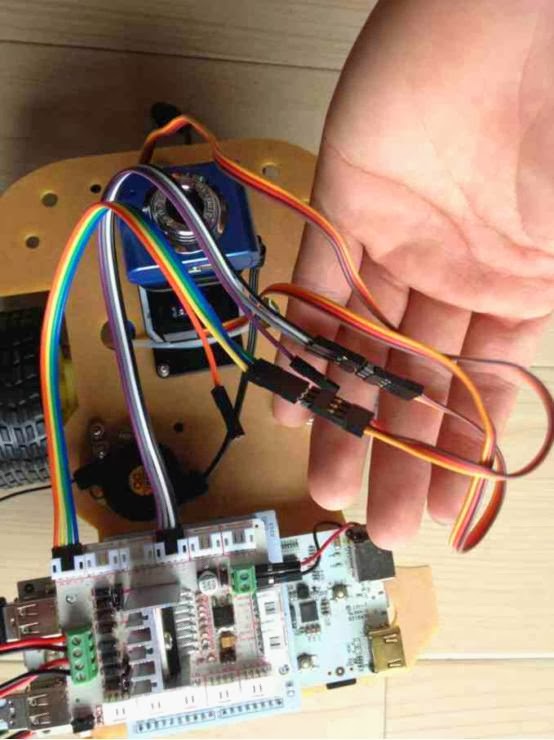
Si votre pcduinoBot plante, ou si vous posséder cette merveilleuse carte qu'est le pcduino et ne savez pas trop quoi en faire, je vous propose d'y installer les fonctionnalités regroupées sous le terme de pcduinoBot.
Vous pouvez repartir de zéro en suivant la procédure indiquée ci dessous :
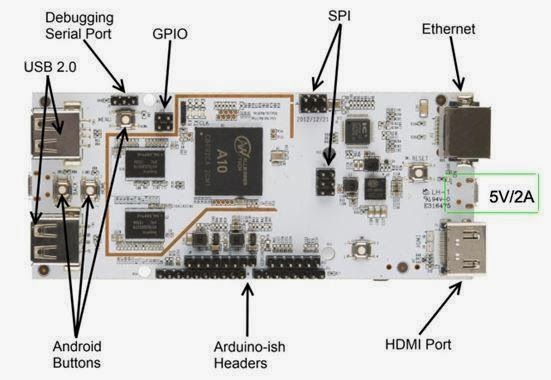
- pour la partie technique, jetez un coup d'oeil là
http://smag0.blogspot.fr/2014/03/rover-pcduino-introduction.html
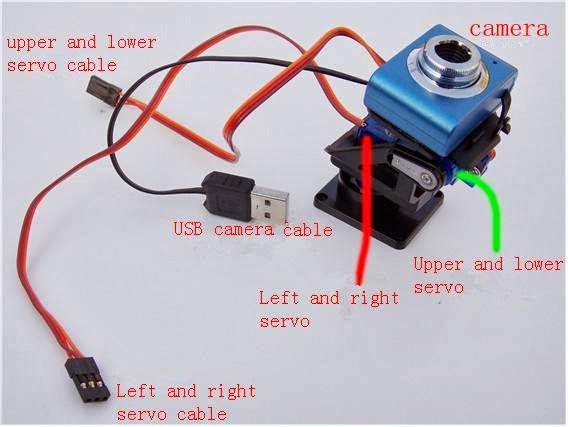
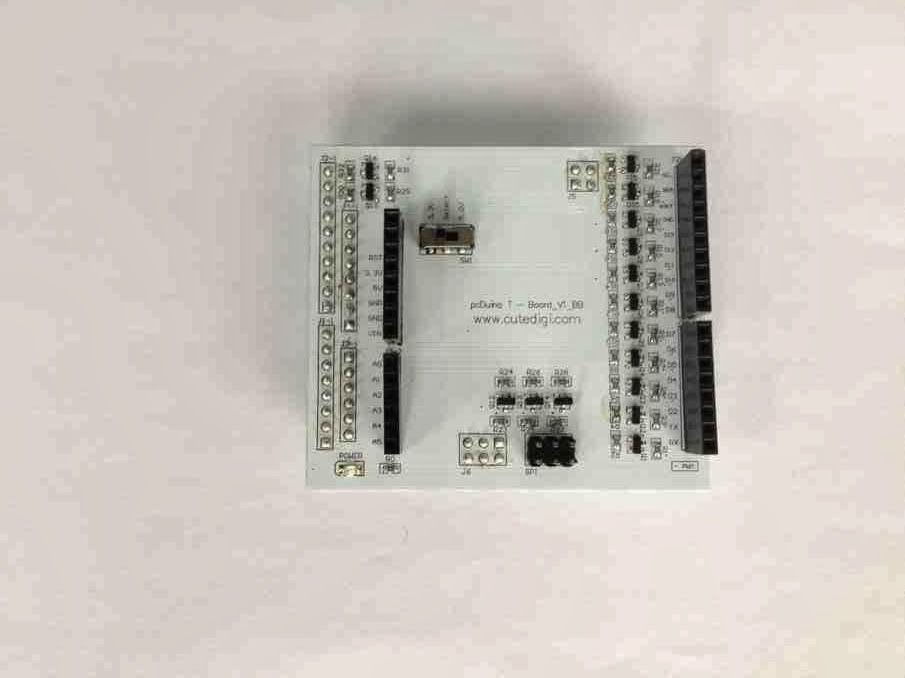
- utilisation d'une carte pcduino V2, avec module wifi noir :
commander le kit matériel complet ou seulement certaines parties
REINSTALLER LE SYSTEME :
- télécharger les images Kernel et Ubuntu ici :
http://www.linksprite.com/image-for-pcduino2/
- les installer selon la procédure ici :
http://www.mon-club-elec.fr/mes_downloads/doc_pcduino/3.pcduino_installation_maj_du_systeme_de_base.pdf ou là :
http://learn.linksprite.com/pcduino/quick-start/steps-to-flash-ubuntu-images-to-pcduino/
ou la méthode plus rapide avec PhoenixSuit plus bas sur cette page.
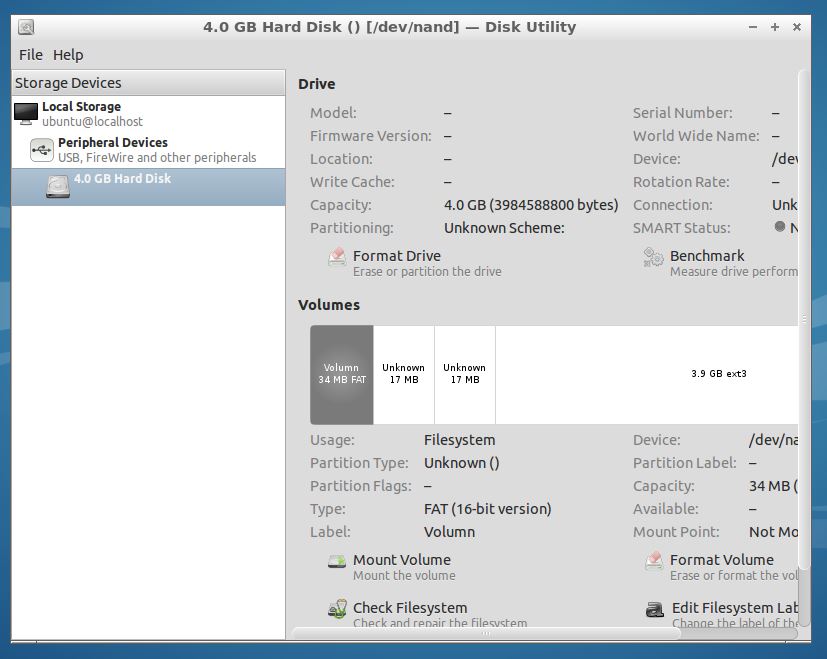
ACTIVER 4GB DE NAND SUR VOTRE PCDUINO
-
http://learn.linksprite.com/pcduino/quick-start/how-to-use-the-4g-nand-flash-for-pcduino/
le lien mentionné ne fonctionne plus , mais dans les commentaires, y'en a un autre sur un site russe, pour vous éviter d'apprendre le russe,
je l'ai mis là ... pour voir la taille de vos disques utilisez la commande "df -h"
avec la notice :
 We prepared a script pcduino-nand-4g-fix to help you extend the space.You can download it, unpack it, and run:
$chmod +x pcduino-nand-4g-fix
$ sudo ./pcduino-nand-4g-fix
it will output:
partition 0: name = bootloader, partition start = 2048, partition size = 65536
partition 1: name = env, partition start = 67584, partition size = 4096
partition 2: name = boot, partition start = 71680, partition size = 32768
partition 3: name = rootfs, partition start = 104448, partition size = 3686400
partition 4: name = UDISK, partition start = 3790848, partition size = 3991552
5 partitions
check partition table copy 0: OK
check partition table copy 1: OK
check partition table copy 2: OK
check partition table copy 3: OK
ready to write new partition tables:
partition 0: name = bootloader, partition start = 2048, partition size = 65536
partition 1: name = env, partition start = 67584, partition size = 4096
partition 2: name = boot, partition start = 71680, partition size = 32768
partition 3: name = rootfs, partition start = 104448, partition size = 7677952
4 partitions
write new partition tables? (Y/N)
y
Press “Y” to confirm, the system will reboot automatically. After reboot, you will get full 4GB.
We prepared a script pcduino-nand-4g-fix to help you extend the space.You can download it, unpack it, and run:
$chmod +x pcduino-nand-4g-fix
$ sudo ./pcduino-nand-4g-fix
it will output:
partition 0: name = bootloader, partition start = 2048, partition size = 65536
partition 1: name = env, partition start = 67584, partition size = 4096
partition 2: name = boot, partition start = 71680, partition size = 32768
partition 3: name = rootfs, partition start = 104448, partition size = 3686400
partition 4: name = UDISK, partition start = 3790848, partition size = 3991552
5 partitions
check partition table copy 0: OK
check partition table copy 1: OK
check partition table copy 2: OK
check partition table copy 3: OK
ready to write new partition tables:
partition 0: name = bootloader, partition start = 2048, partition size = 65536
partition 1: name = env, partition start = 67584, partition size = 4096
partition 2: name = boot, partition start = 71680, partition size = 32768
partition 3: name = rootfs, partition start = 104448, partition size = 7677952
4 partitions
write new partition tables? (Y/N)
y
Press “Y” to confirm, the system will reboot automatically. After reboot, you will get full 4GB.
MJPG-STREAMER :
-
http://learn.linksprite.com/pcduino/install-mjpg-streamer-pcduino/, attention, erreur dans le lien de téléchargement, complétez avec ça :
http://doc.ubuntu-fr.org/mjpg-streamer
- à lancer dans un terminal avec la commande
$ mjpg_streamer -i "/usr/local/lib/input_uvc.so -d /dev/video0 -y -r 320x240 -f 10" -o "/usr/local/lib/output_http.so -p 8090 -w /usr/local/www -p 8090"
ceci lance un serveur accessible à l'adresse http://127.0.0.1:8090 et diffuse en Streaming l'image de votre caméra branchée sur le port USB. On récupérera cette image ensuite, et on l'affichera ensuite avec le serveur python qui gérera les commandes.
Pour lancer la webcam au démarrage, ainsi que le serveur python du paragraphe suivant, éditez le fichier autostart en lançant la commande suivante :
$ sudo leafpad /etc/xdg/lxsession/Lubuntu/autostart
et ajoutez les deux lignes suivantes (la deuxieme est en fait une seule ligne ):
@python /home/ubuntu/smag0/serveur/serveur.py
@mjpg_streamer -i "/usr/local/lib/input_uvc.so -d /dev/video0 -y -r 320x240 -f 10" -o "/usr/local/lib/output_http.so -p 8090 -w /usr/local/www -p 8090"
POUR AVOIR UN JOLI SERVEUR PYTHON PERMETTANT DE COMMANDER NOTRE ROBOT PCDUINO :
installation de Flask : (
http://flask.pocoo.org/)
$ sudo apt-get install python-pip python-dev build-essential
$ sudo pip install --upgrade pip
$ sudo pip install Flask
 |
| librairie Pyduino |
Installer la librairie Pyduino pour l'accès aux PWM en mode analogique et contrôler la vitesse des deux moteurs à courant continu (DC). La taille de notre pcDuino étant comme nous l'avons vue, extensible... mais pas indéfiniment, on peut choisir de n'installer que la librairie est ses prérequis :
Attention la commande d'installation manuelle est à exécuter avec les droits admin :
$ sudo ./install_pyduino.sh
Téléchargez et décompressez le code du serveur python pour commander le pcduino rover et voir les images en streaming : le code du serveur est dispo ici
corriger l'adresse http://192.168.XX.XX:8090 dans la page dimmer-light.html du repertoire template et mettez celle de votre pcduino
à décompresser dans le repertoire /home/ubuntu/smag0, et à lancer avec
$ cd /home/ubuntu/smag0/serveur
$ python serveur.py
vous devriez voir le lancement du serveur, celui-ci est ensuite accessible à l'adresse http://127.0.0.1:8080, ou par le réseau (récupérez l'adresse du pcduino avec un ifconfig, à ce moment , le mieux est d'attribuer une adresse ip fixe à votre carte pcduino, dans la configuration de votre box, ma box sfr le fait très bien, et j'imagine que la votre aussi.)
Il y a même possibilité de demander à votre box de router les entrées sur votre pcduino, afin de permettre de voir les images, ou déplacer votre pcduino rover depuis le bureau... ça fonctionne très bien, mais c'est juste en test, attention, je ne garanti pas la sécurité. c'est à vous de savoir quels ports vous ouvrez, à qui, comment...)
le résultat devrait être proche de ça :
voir aussi, ce qu'on peut faire avec nodejs :
https://www.npmjs.com/package/pcduino
et/ou avec p5js :
http://p5js.org/gallery/
p5js +nodejs + socket.io -->
https://github.com/processing/p5.js/wiki/p5.js,-node.js,-socket.io
d'autres solutions pour monter un serveur web /socket sur le pcduino :
http://indexerror.net/2492/bottle-autobahnpython-pcduino
INSTALLATION FUSEKI (OPTIONNEL)
INSTALLATION JENA
modifications à réintégrer dans le code du fichier dimmer-light.html de serveur.zip (repertoire templates):
<div style="float:left">
<img id="snapshot" src="" class="rotate270"/>
<script> var loc=window.location.hostname;
loc+=':8090/?action=stream' ;
console.log(loc);
document.getElementById("snapshot").src="http://"+loc;
</script>
</div>
PCDUINO EN MODE HOPSPOT / POINT D'ACCES / ACCESS POINT / AP
j'ai testé ça, mais ça m'a planté la carte wifi http://blog.sip2serve.com/post/48899893167/rtl8188-access-point-install-script, mais on peut peut-être s'en inspirer, et mettre les paramètres de cette page, ou voir là : --> marche pas pour l'instant. ça a marché qd j'avais reçu mon pcduino, mais depuis qques mises à jours --> pb
NOTES RAPIDES
pcduino v2
- mettre le clavier en français :
infos pour éviter des galères :
régler l'heure sur pcduino : sudo ntpdate fr.pool.ntp.org
régler le clavier en français : sudo setxkbmap fr
sudo board-config.sh
- configurer la carte avec "board-config" : http://www.mon-club-elec.fr/mes_downloads/doc_pcduino/3b.pcduino_utilitaire_board_config.pdf
- install de pip à rajouter dans le script de réinstall du rover : sudo apt-get install python-pip python-dev build-essential
```
Try this
sudo vi /etc/apt/sources.list
and then make sure uncomment the `wiimu.com' lines and add 'trusty-security / trusty-updates' sources as downbelow
deb http://ports.ubuntu.com/ubuntu-ports/ trusty main universe
deb-src http://ports.ubuntu.com/ubuntu-ports/ trusty main universe
deb http://ports.ubuntu.com/ubuntu-ports/ trusty-security main universe
deb-src http://ports.ubuntu.com/ubuntu-ports/ trusty-security main universe
deb http://ports.ubuntu.com/ubuntu-ports/ trusty-updates main universe
deb-src http://ports.ubuntu.com/ubuntu-ports/ trusty-updates main universe
# deb http://www.wiimu.com:8020/pcduino/ pcduino main
# deb-src http://www.wiimu.com:8020/pcduino/ pcduino main
then do
sudo apt-get update
again, everything works well without annoying 'conflict' or 'pcduino-kernel error' blah blah
```























































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}